New semester, new systems to conquer and new ideas to implement.
![IMG_0979[1]](https://www.eeadventures.com/motordriver/files/2015/08/IMG_09791-300x225.jpg)
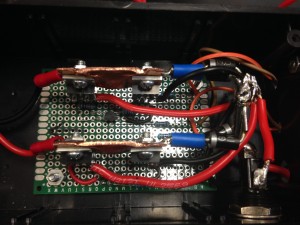

This time my team and I built a motor controller based around a PicAXE micro controller.
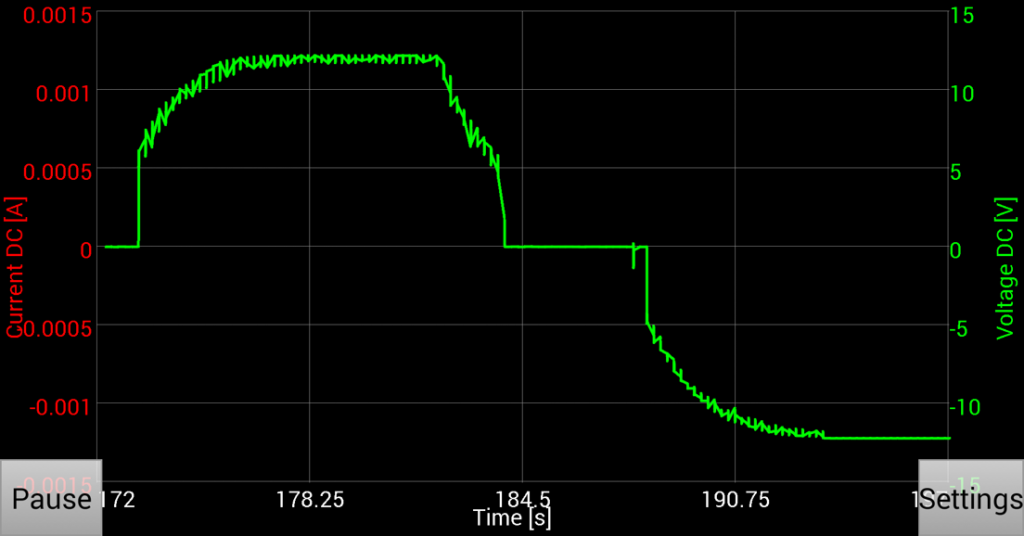
The controller featured smoothed control between any two points via a discrete transfer function with zero-crossing cutoff, a choice of either serial communication or voltage controlled set points, and a set of visual indicators showing both the desired set point and the current transfer function values.
Credit to Joseph Eric Roy and Stefanie Schmidiger as group members.
This project also has its own sub-site available here.