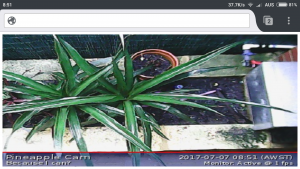
 I decided to plant some pineapples a while back, because who doesn’t like pineapple? I only told a few people about this endeavour but one of those was particularly interested and wouldn’t be around to see them grow and fruit. I suggested that I could make a pineapple cam to monitor their growth from anywhere and soon became busy with work, my studies and an overseas exchange program. I was recently reminded of this fact and so this quick-turn project began. Continue Reading
I decided to plant some pineapples a while back, because who doesn’t like pineapple? I only told a few people about this endeavour but one of those was particularly interested and wouldn’t be around to see them grow and fruit. I suggested that I could make a pineapple cam to monitor their growth from anywhere and soon became busy with work, my studies and an overseas exchange program. I was recently reminded of this fact and so this quick-turn project began. Continue Reading

Recently I attended a toastmasters meeting where speeches are timed and the speaker is shown a green, yellow, red or no light to indicate the usage of their allotted time. It may be obvious by now that I thought I could improve on the timing methods being used. The catch was, I didn’t tell anyone that I was going to build this system. Continue Reading
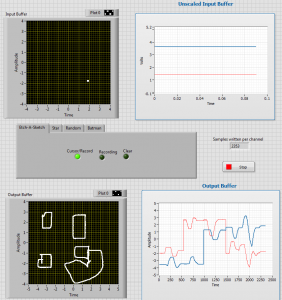
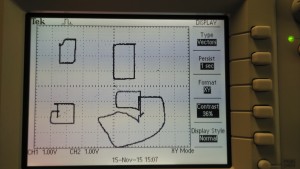
This was an analog data acquisition project,in addition to the extra features shown below there is the usual project sub-site. Continue Reading
 After a crash course on the FORTH programming language, extending the compiler, directly addressing system registers and assembly code we were unleashed to develop our own project in forth.
After a crash course on the FORTH programming language, extending the compiler, directly addressing system registers and assembly code we were unleashed to develop our own project in forth.
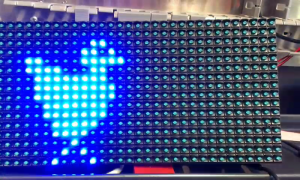
We located a 32 x 16 LED dot matrix display intended for use with an arduino (Link) with basically no hardware documentation and set to work. Dedicated project sub-site here. Continue Reading
New semester, new systems to conquer and new ideas to implement.
![IMG_0979[1]](https://www.eeadventures.com/motordriver/files/2015/08/IMG_09791-300x225.jpg)
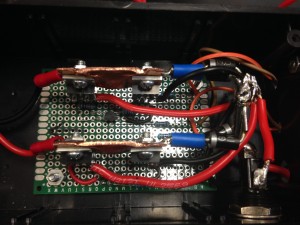

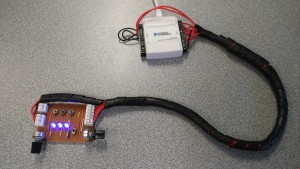
This time my team and I built a motor controller based around a PicAXE micro controller.
The controller featured smoothed control between any two points via a discrete transfer function with zero-crossing cutoff, a choice of either serial communication or voltage controlled set points, and a set of visual indicators showing both the desired set point and the current transfer function values.
Credit to Joseph Eric Roy and Stefanie Schmidiger as group members.
This project also has its own sub-site available here.
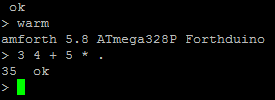 I knew that sooner or later I was going to be learning Forth so I thought I would be proactive and set up one of my micro controllers with AmForth as a development system. Forth is a very low level, stack based, language which is also very versatile and fast (due to being so close to the actual hardware). For the Arduino Uno shortcut Continue Reading
I knew that sooner or later I was going to be learning Forth so I thought I would be proactive and set up one of my micro controllers with AmForth as a development system. Forth is a very low level, stack based, language which is also very versatile and fast (due to being so close to the actual hardware). For the Arduino Uno shortcut Continue Reading
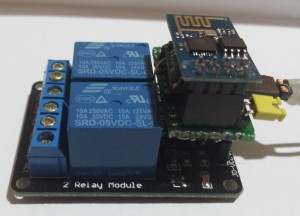 ESP8266 modules have made wireless connectivity a cheap and easy way of remote controlling almost any device. I thought I’d see how cheaply this could be done with the most basic version, the ESP-01.
ESP8266 modules have made wireless connectivity a cheap and easy way of remote controlling almost any device. I thought I’d see how cheaply this could be done with the most basic version, the ESP-01.
With this implementation the web interface’s background colour of each relay is automatically updated to indicate its status, this page is also refreshed periodically in case of multiple users.
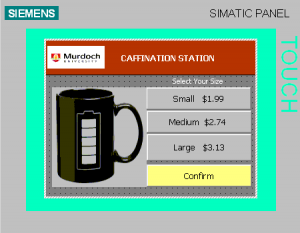 The purpose of this project was to become familiar with the HiGraph (Graphical State Machine) and SCL (Structured Control Language) features within the Siemens S7-300 series PLC.
The purpose of this project was to become familiar with the HiGraph (Graphical State Machine) and SCL (Structured Control Language) features within the Siemens S7-300 series PLC.
We took it upon ourselves to further explore the Human Machine Interface (HMI) capabilities and closely integrate the HMI into the project over a Multi-Point Interface (MPI) network .
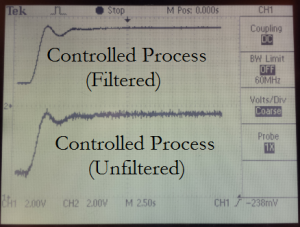
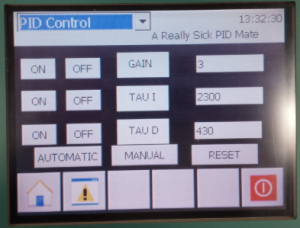
The purpose of this project was to use two standalone Programmable Logic Controllers (PLCs) where one is simulating a process (with artificial noise and disturbances) and the other PLC is acting as a controller. We decided to also include a Human Machine Interface (HMI) to allow the for both monitoring of key information and to adjust/reset the controller parameters. Click Here to be taken to the dedicated sub-site
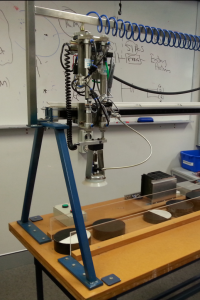
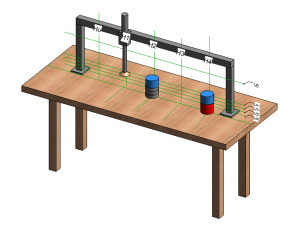
This time my team were tasked with programming a Siemens S7-300 series PLC in ladder logic (only) to solve a ‘puzzle’ from an unknown arrangement and starting position. This ‘puzzle’ was to find and sort two stacks of discs according to the height of each disc in to their prescribed positions. A number of dormant, start-up, recover and e-stop sequences were also prescribed.
Continue Reading